連宏城老師線上教學文:
不過在教學上,為了讓小朋友在組裝時能夠更加容易,避免一些疏漏,所以我將自己的組裝經驗,做了一點小小的筆記。希望能讓小學生在組裝的過程,在細節上,例如:螺絲大小、數量安裝細節...能夠有更多的參考資料。
各部件的補充說明:
補充說明 ~ 下列步驟是依循 連宏城老師的組裝教學網站 的步驟紀錄。
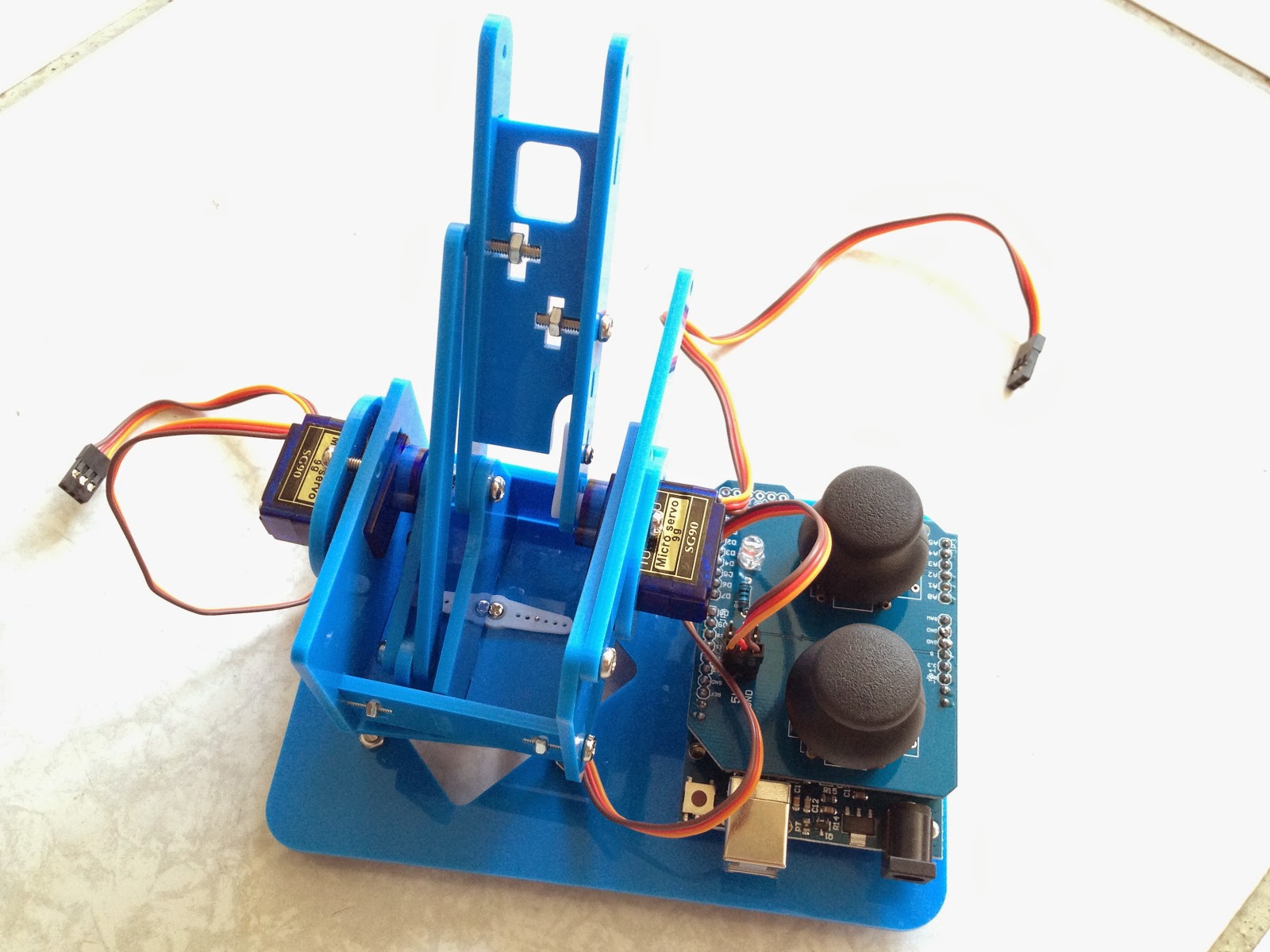
Step 1: 清點套件:


圖片取用自 連宏城老師的組裝教學網站
部份部件有少許備品,例如:螺絲。
- 20mm x 4
- 12mm x 6
- 10mm x 1
- 8mm x 16
- 6mm x 8
- 銅柱 x 7
- 螺帽 x 14
- 伺服馬達 x 4
- Arduino主板 x 1
- 搖桿擴充板 x 1
Step 2: 底座+上控制板
在這一部分,我先偷偷的把最後一步驟的「上控制板」,調整過來,理由是其實不會影響安裝過程,也能夠避免在組裝後,手臂與控制線干擾控制板的安裝。

使用零配件:
- UNO基板與擴充版:銅柱*7,螺帽*4。
- 馬達底座:20mm螺絲*4,螺帽*4。
- 馬達固定:8mm螺絲*2。
Step 3 & 4: 第一顆馬達 & 左臂
第一次施作因為生疏,在施力時要特別放慢,以免弄破壓克力,此外還要特別留意馬達角度調整,這是關鍵。

- 馬達固定:8mm螺絲*2。
- 左臂側板:12mm螺絲*2,螺帽*2。
- 左臂支架(白色馬達轉軸):攻牙螺絲*2。
- 左臂關節:8mm螺絲*1。
Step 5: 右臂
要留意支架的形式與代號。

- 馬達固定:8mm螺絲*2。
- 右臂1號支架:6mm螺絲*1。
- 右臂支架(白色馬達轉軸):攻牙螺絲*2。
Step 6: 左臂+底盤
組裝前注意支架的形式與孔位,避免錯誤時需要大費周章的拆下重新組裝。


- 左內手臂支架:6mm螺絲*1。
- 底座(白色馬達轉軸):攻牙螺絲*2。
Step 7: 右臂+底盤
這一過程比較簡單,只要注意各個側板、底盤的孔位,慢慢套上螺絲鎖緊即可。

Step 8 & Step 9: 中間支架 & 與基座合體
Step 10 & Step 11: 支桿一 & 支桿二
中間支架在安裝時需要注意孔位與方向性。
- 中間支架:12mm螺絲*2,螺帽*2。
- 支桿一 :6mm螺絲*1。
- 支桿二:6mm螺絲*1,8mm螺絲*2。
Step 12 & Step 13: 最後一顆馬達 & 夾具一
Step 14 & Step 15: 夾具二 & 上夾具
最後來到夾具的步驟,我覺得最難的在夾具馬達的角度設定操作,試了幾次連老師的說明,其實一直失敗,後來我的作法很簡單,先讓馬達「順時針轉到底」,套上夾具後轉開夾具兩邊爪子帶動馬達,再重新鬆開夾具,讓左右爪子閉合後再固定夾具。

- 馬達座固定:8mm螺絲*4。
- 上夾具於支架上:8mm螺絲*2。
- 夾具爪子固定:6mm螺絲*2。
- 夾具馬達控制臂:攻牙螺絲*2,6mm螺絲*1,10mm螺絲*1。
結語:
製作過程雖然繁複,但組裝完畢後的喜悅是甘美的。MeArm 是學習 Arduino 非常不錯的工具,教程中利用ArduBlock圖示化的程式語言介面,對學生來說非常友善。連老師更透過38個教程,一步一步介紹了 Arduino 的基本控制語法。


借花獻佛,要謝謝您才是。
回覆刪除